This PR adds in support for semi-structured sparsity via a tensor
subclass. It currently uses the CUTLASS kernels merged in PR #100881.
In the future we plan to add in cuSPARSELt support (see the other PRs in
the stack), which will give us larger performance gains.
This PR adds in 2 things:
- a Tensor subclass, `SparseSemiStructuredTensor` to store the
sparse tensor in copmressed form and override `__torch_dispatch__`.
- a conversion function that takes in a dense tensor and a
semi-structured sparse bool mask and creates an instance of the
subclass.
**SparseSemiStructuredTensor**
The subclass stores the dense tensor in a contiguous flattened tensor
for future compatability with cuSPARSELt, which expects this format.
Note that the CUTLASS kernels do not have this limitation, as the
specified values and the metadata are passed separately in
`_structured_sparse_linear`. In the future we can use the cuSPARSELT bindings
[here](https://github.com/pytorch/pytorch/pull/103700) for faster matmul, better dtype converage, and relaxed shape
constraints.
Since we currently don't have a way to go back from the sparse
representation to the dense representation, and we store the weights in
compressed form, we don't have a great way to handle .t().
Instead, we keep track of how often we've called transpose on our
tensor, and if it's an unexpected number we throw an error. When the first
argument is sparse, we expect an even number of calls to transpose,
while when the second argument is sparse, we expect an odd number of
calls. This is because we support second argument sparse matrix
multiplications by using transpose properties.
**to_sparse_semi_structured**
This is a conversion function to convert a dense tensor and a
semi-structured sparse bool mask into a subclass. Currently, we must
pass in a bool mask, since we can't infer it becuase there may be
additional zero elements in the dense tensor, so `tensor !=0` is not 2:4
sparse.
Once we add either a method to derive the mask from the dense tensor or
cuSPARSELt, we no longer need to pass in the mask. cuSPARSELt has it's
own helper functions to create the metadata mask.
**User Details**
We have implemented support for the following ops for `torch.float16`
and `torch.int8`:
```
torch.addmm(bias, dense, sparse.t())
torch.mm(dense, sparse)
torch.mm(sparse, dense)
aten.linear.default
aten.t.default
aten.t.detach
```
The end user interface to accelerate a nn.Linaer module with the
subclass would look like this:
```
from torch.sparse import to_sparse_semi_structured
mask = torch.Tensor([0, 0, 1, 1]).tile(128, 32).cuda().bool()
linear = Model(128, 128).half().cuda()
linear.weight = nn.Parameter(to_sparse_semi_structured(linear.weight,
mask=linear.weight.bool())
```
This also updates tests and the `torch.sparse` module docstring to
reflect these changes.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/102135
Approved by: https://github.com/albanD
This PR adds in support for semi-structured sparsity via a tensor
subclass. It currently uses the CUTLASS kernels merged in PR #100881.
In the future we plan to add in cuSPARSELt support (see the other PRs in
the stack), which will give us larger performance gains.
This PR adds in 2 things:
- a Tensor subclass, `SparseSemiStructuredTensor` to store the
sparse tensor in copmressed form and override `__torch_dispatch__`.
- a conversion function that takes in a dense tensor and a
semi-structured sparse bool mask and creates an instance of the
subclass.
**SparseSemiStructuredTensor**
The subclass stores the dense tensor in a contiguous flattened tensor
for future compatability with cuSPARSELt, which expects this format.
Note that the CUTLASS kernels do not have this limitation, as the
specified values and the metadata are passed separately in
`_structured_sparse_linear`. In the future we can use the cuSPARSELT bindings
[here](https://github.com/pytorch/pytorch/pull/103700) for faster matmul, better dtype converage, and relaxed shape
constraints.
Since we currently don't have a way to go back from the sparse
representation to the dense representation, and we store the weights in
compressed form, we don't have a great way to handle .t().
Instead, we keep track of how often we've called transpose on our
tensor, and if it's an unexpected number we throw an error. When the first
argument is sparse, we expect an even number of calls to transpose,
while when the second argument is sparse, we expect an odd number of
calls. This is because we support second argument sparse matrix
multiplications by using transpose properties.
**to_sparse_semi_structured**
This is a conversion function to convert a dense tensor and a
semi-structured sparse bool mask into a subclass. Currently, we must
pass in a bool mask, since we can't infer it becuase there may be
additional zero elements in the dense tensor, so `tensor !=0` is not 2:4
sparse.
Once we add either a method to derive the mask from the dense tensor or
cuSPARSELt, we no longer need to pass in the mask. cuSPARSELt has it's
own helper functions to create the metadata mask.
**User Details**
We have implemented support for the following ops for `torch.float16`
and `torch.int8`:
```
torch.addmm(bias, dense, sparse.t())
torch.mm(dense, sparse)
torch.mm(sparse, dense)
aten.linear.default
aten.t.default
aten.t.detach
```
The end user interface to accelerate a nn.Linaer module with the
subclass would look like this:
```
from torch.sparse import to_sparse_semi_structured
mask = torch.Tensor([0, 0, 1, 1]).tile(128, 32).cuda().bool()
linear = Model(128, 128).half().cuda()
linear.weight = nn.Parameter(to_sparse_semi_structured(linear.weight,
mask=linear.weight.bool())
```
This also updates tests and the `torch.sparse` module docstring to
reflect these changes.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/102135
Approved by: https://github.com/albanD
Reference cycles are freed by the cycle collector rather than being cleaned up
when the objects in the cycle first become unreachable. If a cycle points to a tensor,
the CUDA memory for that tensor will not be freed until garbage collection runs.
Accumulation of CUDA allocations can lead to out of memory errors (OOMs), as well as
non-deterministic allocation behavior which is harder to debug.
This visualizer installs a garbage collection hook to look for cycles containing
CUDA tensors and saves a visualization of the garbage:
```
from torch.cuda._cycleviz import warn_tensor_cycles
warn_tensor_cycles()
# do some work that results in a cycle getting garbage collected
# ...
> WARNING:root:Reference cycle includes a CUDA Tensor see visualization of cycle /tmp/tmpeideu9gl.html
```
Reland to make windows skip the test.
This reverts commit 7b3b6dd426.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/104051
Approved by: https://github.com/aaronenyeshi, https://github.com/malfet
The following subjects are not in this PR and will be done in a follow up:
- Go through torch_function section and update to the latest phrasing and link to the proper new sections
- Go through torch.library and custom device docs to add links to the new sections as appropriate
- Top level explanations on which component should be used
Pull Request resolved: https://github.com/pytorch/pytorch/pull/102087
Approved by: https://github.com/janeyx99
Reference cycles are freed by the cycle collector rather than being cleaned up
when the objects in the cycle first become unreachable. If a cycle points to a tensor,
the CUDA memory for that tensor will not be freed until garbage collection runs.
Accumulatin of CUDA allocations can lead to out of memory errors (OOMs), as well as
non-deterministic allocation behavior which is harder to debug.
This visualizer installs a garbage collection hook to look for cycles containing
CUDA tensors and saves a visualization of the garbage:
```
from torch.cuda._cycleviz import warn_tensor_cycles
warn_tensor_cycles()
# do some work that results in a cycle getting garbage collected
# ...
> WARNING:root:Reference cycle includes a CUDA Tensor see visualization of cycle /tmp/tmpeideu9gl.html
```
Pull Request resolved: https://github.com/pytorch/pytorch/pull/102656
Approved by: https://github.com/aaronenyeshi
**Summary**
- Update the quantization document that default qconfig with oneDNN backend is recommended to be used on CPUs with Vector Neural Network Instruction support.
- Add the warning message when user uses default qconfig with oneDNN backend on CPU without Vector Neural Network Instruction support.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/103653
Approved by: https://github.com/jgong5, https://github.com/malfet
# torch.compiler public API
## Goal
The goal of this document is to describe the public facing API for torchdynamo and torchinductor.
Today both dynamo and torchinductor are in `torch/_dynamo` and `torch/_inductor` namespace with the only public function
`torch.compile()` which is directly placed in `torch/__init__.py`
This poses a few problems for users trying to take dependencies on PyTorch 2.0
1. Unclear BC guarantees
2. No builtin discovery mechanism outside of reading the source code
3. No hard requirements for docstrings or type annotations
Most importantly it mixes two personas the PyTorch 2.0 developer vs the PyTorch 2.0 customer so this is an attempt to address this. We draw a lot of inspiration from the `functorch` migration to the `func` namespace.
## Alternate names
We did discuss some other alternative names
1. `torch.compile` -> problem is this would break BC on the existing `torch.compile` function
2. `torch.dynamo` -> `dynamo` is so far not something we've deliberately hidden from users but problem is now figuring out what it's `_dynamo` vs `dynamo` might be confusing
3. `torch.compiler` -> 1 would be better but to keep BC this is a good compromise
# The general approach
## Proposal 1
In https://github.com/pytorch/pytorch/blob/main/torch/_dynamo/__init__.py
We have function called `reset()`, this function is essential if users are trying to `torch.compile()` a model under different settings
```python
# in _dynamo/
def reset():
do_reset_stuff()
```
Instead we propose
```python
# in compiler/
def reset():
do_reset_stuff() # As in copy paste the logic from _dynamo.reset
# in _dynamo/
import warnings
import inspect
def reset():
function_name = inspect.currentframe().f_code.co_name
warnings.warn(f"{function_name} is deprecated, use compiler.{function_name} instead", DeprecationWarning)
return compiler.reset()
```
## Proposal 2
```python
# in compiler/
def reset():
“””
Docstrings here
“””
_dynamo.reset()
# in _dynamo/
No changes
```
Consensus so far seems to be proposal 2 since fewer warnings will be less jarring and it’ll make it quite easy to merge the public API
## Docstrings
The above was an example of a function that has no inputs or outputs but there are other functions which could use an improvement in their docstrings, for example allow_in_graph actually works over lists of functions but that’s not mentioned anywhere in the example only if you read the source code.
def allow_in_graph(fn):
"""
Customize which functions TorchDynamo will include in the generated
graph. Similar to `torch.fx.wrap()`.
Parameters:
fn (callable or list/tuple): The function(s) to be allowed in the graph.
Returns:
callable or list/tuple: The input function(s) included in the graph.
Examples:
Customize inclusion of a single function:
::
torch._dynamo.allow_in_graph(my_custom_function)
Customize inclusion of multiple functions:
::
torch._dynamo.allow_in_graph([my_custom_function1, my_custom_function2])
@torch._dynamo.optimize(...)
def fn(a):
x = torch.add(x, 1)
x = my_custom_function(x)
x = torch.add(x, 1)
return x
fn(...)
Notes:
The `allow_in_graph` function allows customization of which functions TorchDynamo
includes in the generated graph. It can be used to include specific functions that
are not automatically captured by TorchDynamo.
If `fn` is a list or tuple, `allow_in_graph` will be called recursively on each
element in the sequence.
Once a function is allowed in the graph using `allow_in_graph`, it will be captured
in the graph generated by TorchDynamo. This customization enables more fine-grained
control over the functions included in the graph.
Note that `allow_in_graph` expects the input `fn` to be a callable.
"""
if isinstance(fn, (list, tuple)):
return [allow_in_graph(x) for x in fn]
assert callable(fn), "allow_in_graph expects a callable"
allowed_functions._allowed_function_ids.add(id(fn))
allowed_functions._disallowed_function_ids.remove(id(fn))
return fn
So to make the API public, we’d have to write similar docstrings for all public functions we’d like to create.
The benefit of this approach is that
1. No BC risks, internal and external users relying on our tooling can slowly wean off the private functions.
2. We will also have to write correct docstrings which will automatically make our documentation easier to maintain and render correctly on pytorch.org
3. We already have some BC guarantees already, we don’t kill OptimizedModule, we rejected the PR to change the config system
The con of this approach is that
Will be stuck with some potentially suboptimal functions/classes that you can’t kill
## Testing strategy
If the approach is to mostly make a public function call an already tested private function then all we need to do is ensure that the function signatures don't change
## Which functions should be in the public API
Our heuristic for deciding whether something should be public or not is are users already relying on it for lack of other options or have we recommended some non public functions for users to debug their PT 2.0 programs.
Heuristic for not putting something in public is that it’s an experimental subsystem with the goal of turning it on by default, it’s very core dev centric, meta centric, a bunch of different configs that should be batched into a single user facing one, or something that needs to be renamed because the name is confusing
#### Top level
`torch.compile()` -> already is a public API it does require some minor improvements like having configs be passed in to any backend and not just inductor (EDIT: This was already done https://github.com/pytorch/pytorch/pull/99645l) and renaming `mode=reduce-overhead` to `mode=cudagraph`
To make sure that PT 2.0 is supported with a given pytorch version users can create a new public function and this would replace the need for `try/except` blocks around `import torch._dynamo` that has been populating user code.
```python
def pt2_enabled():
if hasattr(torch, 'compile'):
return True
else:
return False
```
For all of the below they will be translated to `torch.compiler.function_name()`
#### From _dynamo
As a starting point we looked at https://github.com/pytorch/pytorch/blob/main/torch/_dynamo/__init__.py and we suggest redefining these functions in `pytorch/torch/compiler/__init__.py`
It might also make sense to split them over multiple files and import them in `__init__.py` but because the number of functions is small it'd probably be fine to add them all into a single compiler/__init__.py until this list becomes larger
1. `reset()`
2. `allow_in_graph()`
10. `list_backends()`
12. `compile()`: torch.compile() would be mostly a shell function passing arguments to torch.compiler.compile()
13. `assume_constant_result()`: TODO: Double check how this is useful
15. `torch._dynamo.disable()`
Some notable omissions
11. `explain()`: We need to clean up the output for this function, make it a data class and pretty printable
1. `forbid_in_graph()`: Considered adding this but should instead consolidate on `disallow_in_graph`
2. `optimize_assert()`: Already covered by `torch.compile(fullgraph=True)`
3. `check_if_dynamo_supported()`: this would be supplanted by pt2_enabled()
4. `compilation_metrics`, `graph_breaks_reasons` ..: would all be accessed via `torch.compiler.explain()`
5. `replay` does not seem useful to end customers
6. . `graph_break()`: Mostly useful for debugging or unit tests
9. `register_backend()`: End users will just pass a string backend to torch.compile, only devs will create new backends
10. `export()` : Eventually this needs to public but for now it’s not ready so just highlighting that it will be in the public API eventually
11. `disallow_in_graph()`: Usage is limited
12. `mark_static()`: we can keep this private until dynamic=True is recommended in stable
13. `mark_dynamic()`: we can keep this private until dynamic=True is recommended in trunk
14. 8. `OptimizedModule`: This is the only class that we'd expose but is crucial since users are running code like `if isinstance(mod, OptimizedModule): torch.save(mod._orig_mod)` EDIT: because we fixed pickling we no longer need to
expose this
15. `is_compiling()`: Still not clear how this useful to end users
There are also config variables which we need to expose https://github.com/pytorch/pytorch/blob/main/torch/_dynamo/config.py
Some of our configs are useful dev flags, others are to gate experimental functionality and others are essential debugging tools and we seperate out the essential debugging and logging tools to a public facing config.
TODO: I still need to think of a good way of porting the config in a BC way here are some ideas
1. Just make all passes available and controllable via `torch.compile(options={})` but only show docstrings for the ones users should care about.
The current problem with our config system is we have 3 ways of setting them once via `options={}`, environment variables and variables in `config.py`, it'd be worth settling on one source of truth and have that be the public API.
The configs we should make public are
1. `log_file_name`
2. `verbose`
3. `cache_size_limit`
4. `repro_level` and `repro_after`: Although we can rename these to minifier and give human readable names to the levels
Everything else should stay private in particular
1. `print_graph_breaks`, `print_specializations`: should be supplanted by `explain()` for public users
2. dynamic shape configs : Users should only have to worry about `torch.compile(dynamic=True/False)`
3. The distributed flags, hook or guard configs: If we tell a user to use FSDP and DDP then the flag should be enabled by default or be in a private namespace
4. The fbcode flags: Obviously no need to be user facing
5. Skip/Allow lists: Not something normal users should play around with
#### From _inductor
Very little of inductor should be exposed in a public facing API, our core audience as in people writing models mostly just need information on what certain passes mean and how to control them a high level and they can do this with `torch.compile(options={})` so the goal here should be more to make available passes clearer and ideally consolidate them into `torch.compile()` docstrings or modes.
There are some exceptions though from https://github.com/pytorch/pytorch/blob/main/torch/_inductor/__init__.py
1. `list_mode_options()`
2. `list_options()`: this needs an additional pass to hide internal or debug options
For both of these we’d rename them to compiler.inductor_list_mode_options and compiler.inductor_list_options() since they would be in the same init file as the one for dynamo
Notable omissions
1. `_inductor.compile()`: Because of users are coming in with their own fx graph, they are likely developers
2. `_inductor.aot_compile()`:Again this is about capturing and modifying fx graphs so users APIs don't need to be public
However the configs are a slightly different story, because we can choose to either
1. Make all configs public
2. Make some configs public and keep most of the private ones. If public config is set it should override the private version
3. Make all configs controllable via `torch.compile(options={})` but make list_options() hide more things
For now 3 seems like the most reasonable choice with some high level configs we’ll keep like TORCH_COMPILE_DEBUG
Regardless here's what should probably be public or advertised more
1. `disable_progress` and verbose_progress: Combine and enable by default
2. `fallback_random`: We could make the case this shouldn't be public if a top level deterministic mode enables this
3. `profile_bandwidth`: Or could make the case that this should be in TORCH_COMPILE_DEBUG
Notable omissions
1. Any config that would generally improve performance for most that we should probably enable by default but might be disabled in the short term because of stability: example `epilogue_fusion`, `pattern_matcher`, `reordering`
2. Autotuning flags: Should just sit behind `torch.compile(mode="max-autotune")` like `max_autotune`, `max_autotune_gemm`
3. `coordinate_descent_tuning`: This one I'm a but mixed about, maybe it just also fall into `mode="max-autotune"`
4. `trace`: `TORCH_COMPILE_DEBUG` is the best flag for all of this
5. `triton.cudagraphs`: Default should be `torch.compile(mode="reduce-overhead")` - I'd go further and rename the `mode=cudagraph` and we can keep reduce-overhead for BC reasons
6. `triton_unique_kernel_names`: Mostly useful for devs debugging
7. `dce`: which doesnt really do anything
8. `shape_padding`: Elias is working on enabling this by default in which case we also remove it
## Mechanics
This PR would include the public functions with their docstrings
Another PR will take a stab at the configs
And for work where the APIs are still being cleaned up whether its minifier or escape hatches, export or dynamic shapes, aot_inductor etc.. we’ll keep them private until a public commitment can be made
Pull Request resolved: https://github.com/pytorch/pytorch/pull/102182
Approved by: https://github.com/jansel, https://github.com/albanD
# torch.compiler public API
## Goal
The goal of this document is to describe the public facing API for torchdynamo and torchinductor.
Today both dynamo and torchinductor are in `torch/_dynamo` and `torch/_inductor` namespace with the only public function
`torch.compile()` which is directly placed in `torch/__init__.py`
This poses a few problems for users trying to take dependencies on PyTorch 2.0
1. Unclear BC guarantees
2. No builtin discovery mechanism outside of reading the source code
3. No hard requirements for docstrings or type annotations
Most importantly it mixes two personas the PyTorch 2.0 developer vs the PyTorch 2.0 customer so this is an attempt to address this. We draw a lot of inspiration from the `functorch` migration to the `func` namespace.
## Alternate names
We did discuss some other alternative names
1. `torch.compile` -> problem is this would break BC on the existing `torch.compile` function
2. `torch.dynamo` -> `dynamo` is so far not something we've deliberately hidden from users but problem is now figuring out what it's `_dynamo` vs `dynamo` might be confusing
3. `torch.compiler` -> 1 would be better but to keep BC this is a good compromise
# The general approach
## Proposal 1
In https://github.com/pytorch/pytorch/blob/main/torch/_dynamo/__init__.py
We have function called `reset()`, this function is essential if users are trying to `torch.compile()` a model under different settings
```python
# in _dynamo/
def reset():
do_reset_stuff()
```
Instead we propose
```python
# in compiler/
def reset():
do_reset_stuff() # As in copy paste the logic from _dynamo.reset
# in _dynamo/
import warnings
import inspect
def reset():
function_name = inspect.currentframe().f_code.co_name
warnings.warn(f"{function_name} is deprecated, use compiler.{function_name} instead", DeprecationWarning)
return compiler.reset()
```
## Proposal 2
```python
# in compiler/
def reset():
“””
Docstrings here
“””
_dynamo.reset()
# in _dynamo/
No changes
```
Consensus so far seems to be proposal 2 since fewer warnings will be less jarring and it’ll make it quite easy to merge the public API
## Docstrings
The above was an example of a function that has no inputs or outputs but there are other functions which could use an improvement in their docstrings, for example allow_in_graph actually works over lists of functions but that’s not mentioned anywhere in the example only if you read the source code.
def allow_in_graph(fn):
"""
Customize which functions TorchDynamo will include in the generated
graph. Similar to `torch.fx.wrap()`.
Parameters:
fn (callable or list/tuple): The function(s) to be allowed in the graph.
Returns:
callable or list/tuple: The input function(s) included in the graph.
Examples:
Customize inclusion of a single function:
::
torch._dynamo.allow_in_graph(my_custom_function)
Customize inclusion of multiple functions:
::
torch._dynamo.allow_in_graph([my_custom_function1, my_custom_function2])
@torch._dynamo.optimize(...)
def fn(a):
x = torch.add(x, 1)
x = my_custom_function(x)
x = torch.add(x, 1)
return x
fn(...)
Notes:
The `allow_in_graph` function allows customization of which functions TorchDynamo
includes in the generated graph. It can be used to include specific functions that
are not automatically captured by TorchDynamo.
If `fn` is a list or tuple, `allow_in_graph` will be called recursively on each
element in the sequence.
Once a function is allowed in the graph using `allow_in_graph`, it will be captured
in the graph generated by TorchDynamo. This customization enables more fine-grained
control over the functions included in the graph.
Note that `allow_in_graph` expects the input `fn` to be a callable.
"""
if isinstance(fn, (list, tuple)):
return [allow_in_graph(x) for x in fn]
assert callable(fn), "allow_in_graph expects a callable"
allowed_functions._allowed_function_ids.add(id(fn))
allowed_functions._disallowed_function_ids.remove(id(fn))
return fn
So to make the API public, we’d have to write similar docstrings for all public functions we’d like to create.
The benefit of this approach is that
1. No BC risks, internal and external users relying on our tooling can slowly wean off the private functions.
2. We will also have to write correct docstrings which will automatically make our documentation easier to maintain and render correctly on pytorch.org
3. We already have some BC guarantees already, we don’t kill OptimizedModule, we rejected the PR to change the config system
The con of this approach is that
Will be stuck with some potentially suboptimal functions/classes that you can’t kill
## Testing strategy
If the approach is to mostly make a public function call an already tested private function then all we need to do is ensure that the function signatures don't change
## Which functions should be in the public API
Our heuristic for deciding whether something should be public or not is are users already relying on it for lack of other options or have we recommended some non public functions for users to debug their PT 2.0 programs.
Heuristic for not putting something in public is that it’s an experimental subsystem with the goal of turning it on by default, it’s very core dev centric, meta centric, a bunch of different configs that should be batched into a single user facing one, or something that needs to be renamed because the name is confusing
#### Top level
`torch.compile()` -> already is a public API it does require some minor improvements like having configs be passed in to any backend and not just inductor (EDIT: This was already done https://github.com/pytorch/pytorch/pull/99645l) and renaming `mode=reduce-overhead` to `mode=cudagraph`
To make sure that PT 2.0 is supported with a given pytorch version users can create a new public function and this would replace the need for `try/except` blocks around `import torch._dynamo` that has been populating user code.
```python
def pt2_enabled():
if hasattr(torch, 'compile'):
return True
else:
return False
```
For all of the below they will be translated to `torch.compiler.function_name()`
#### From _dynamo
As a starting point we looked at https://github.com/pytorch/pytorch/blob/main/torch/_dynamo/__init__.py and we suggest redefining these functions in `pytorch/torch/compiler/__init__.py`
It might also make sense to split them over multiple files and import them in `__init__.py` but because the number of functions is small it'd probably be fine to add them all into a single compiler/__init__.py until this list becomes larger
1. `reset()`
2. `allow_in_graph()`
10. `list_backends()`
12. `compile()`: torch.compile() would be mostly a shell function passing arguments to torch.compiler.compile()
13. `assume_constant_result()`: TODO: Double check how this is useful
15. `torch._dynamo.disable()`
Some notable omissions
11. `explain()`: We need to clean up the output for this function, make it a data class and pretty printable
1. `forbid_in_graph()`: Considered adding this but should instead consolidate on `disallow_in_graph`
2. `optimize_assert()`: Already covered by `torch.compile(fullgraph=True)`
3. `check_if_dynamo_supported()`: this would be supplanted by pt2_enabled()
4. `compilation_metrics`, `graph_breaks_reasons` ..: would all be accessed via `torch.compiler.explain()`
5. `replay` does not seem useful to end customers
6. . `graph_break()`: Mostly useful for debugging or unit tests
9. `register_backend()`: End users will just pass a string backend to torch.compile, only devs will create new backends
10. `export()` : Eventually this needs to public but for now it’s not ready so just highlighting that it will be in the public API eventually
11. `disallow_in_graph()`: Usage is limited
12. `mark_static()`: we can keep this private until dynamic=True is recommended in stable
13. `mark_dynamic()`: we can keep this private until dynamic=True is recommended in trunk
14. 8. `OptimizedModule`: This is the only class that we'd expose but is crucial since users are running code like `if isinstance(mod, OptimizedModule): torch.save(mod._orig_mod)` EDIT: because we fixed pickling we no longer need to
expose this
15. `is_compiling()`: Still not clear how this useful to end users
There are also config variables which we need to expose https://github.com/pytorch/pytorch/blob/main/torch/_dynamo/config.py
Some of our configs are useful dev flags, others are to gate experimental functionality and others are essential debugging tools and we seperate out the essential debugging and logging tools to a public facing config.
TODO: I still need to think of a good way of porting the config in a BC way here are some ideas
1. Just make all passes available and controllable via `torch.compile(options={})` but only show docstrings for the ones users should care about.
The current problem with our config system is we have 3 ways of setting them once via `options={}`, environment variables and variables in `config.py`, it'd be worth settling on one source of truth and have that be the public API.
The configs we should make public are
1. `log_file_name`
2. `verbose`
3. `cache_size_limit`
4. `repro_level` and `repro_after`: Although we can rename these to minifier and give human readable names to the levels
Everything else should stay private in particular
1. `print_graph_breaks`, `print_specializations`: should be supplanted by `explain()` for public users
2. dynamic shape configs : Users should only have to worry about `torch.compile(dynamic=True/False)`
3. The distributed flags, hook or guard configs: If we tell a user to use FSDP and DDP then the flag should be enabled by default or be in a private namespace
4. The fbcode flags: Obviously no need to be user facing
5. Skip/Allow lists: Not something normal users should play around with
#### From _inductor
Very little of inductor should be exposed in a public facing API, our core audience as in people writing models mostly just need information on what certain passes mean and how to control them a high level and they can do this with `torch.compile(options={})` so the goal here should be more to make available passes clearer and ideally consolidate them into `torch.compile()` docstrings or modes.
There are some exceptions though from https://github.com/pytorch/pytorch/blob/main/torch/_inductor/__init__.py
1. `list_mode_options()`
2. `list_options()`: this needs an additional pass to hide internal or debug options
For both of these we’d rename them to compiler.inductor_list_mode_options and compiler.inductor_list_options() since they would be in the same init file as the one for dynamo
Notable omissions
1. `_inductor.compile()`: Because of users are coming in with their own fx graph, they are likely developers
2. `_inductor.aot_compile()`:Again this is about capturing and modifying fx graphs so users APIs don't need to be public
However the configs are a slightly different story, because we can choose to either
1. Make all configs public
2. Make some configs public and keep most of the private ones. If public config is set it should override the private version
3. Make all configs controllable via `torch.compile(options={})` but make list_options() hide more things
For now 3 seems like the most reasonable choice with some high level configs we’ll keep like TORCH_COMPILE_DEBUG
Regardless here's what should probably be public or advertised more
1. `disable_progress` and verbose_progress: Combine and enable by default
2. `fallback_random`: We could make the case this shouldn't be public if a top level deterministic mode enables this
3. `profile_bandwidth`: Or could make the case that this should be in TORCH_COMPILE_DEBUG
Notable omissions
1. Any config that would generally improve performance for most that we should probably enable by default but might be disabled in the short term because of stability: example `epilogue_fusion`, `pattern_matcher`, `reordering`
2. Autotuning flags: Should just sit behind `torch.compile(mode="max-autotune")` like `max_autotune`, `max_autotune_gemm`
3. `coordinate_descent_tuning`: This one I'm a but mixed about, maybe it just also fall into `mode="max-autotune"`
4. `trace`: `TORCH_COMPILE_DEBUG` is the best flag for all of this
5. `triton.cudagraphs`: Default should be `torch.compile(mode="reduce-overhead")` - I'd go further and rename the `mode=cudagraph` and we can keep reduce-overhead for BC reasons
6. `triton_unique_kernel_names`: Mostly useful for devs debugging
7. `dce`: which doesnt really do anything
8. `shape_padding`: Elias is working on enabling this by default in which case we also remove it
## Mechanics
This PR would include the public functions with their docstrings
Another PR will take a stab at the configs
And for work where the APIs are still being cleaned up whether its minifier or escape hatches, export or dynamic shapes, aot_inductor etc.. we’ll keep them private until a public commitment can be made
Pull Request resolved: https://github.com/pytorch/pytorch/pull/102182
Approved by: https://github.com/jansel
Adding to the docs for now, hopefully we can move to `cudaMallocAsync`-backed cuBLAS workspaces soon which should alleviate the recent confusion around `cuBLAS` "leaking" memory through workspaces.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/100919
Approved by: https://github.com/ngimel
To make TP more generic for Attention module, we come up with this new col/rowwise parallel style.
Basically, the idea behind is that:
We only do DTensor op for Col/Rowwise sharded part. For the rest of ATen ops, we will leave it to Tensor ops.
And we set this behavior as default for Colwise and Rowwise parallel style. If people want to customize it, they can always pass in different prepare_input or prepare_output
Pull Request resolved: https://github.com/pytorch/pytorch/pull/100508
Approved by: https://github.com/wanchaol
Fixes #ISSUE_NUMBER
1、add checkpoint support for custom device
2、add a device argument, I want to add a device="cuda" parameter to the func `forward` of `CheckpointFunction`, and I can specify the device type when using it, but the func `apply` of `torch.autograd.Function` does not support `kwargs`, so I added a variable named `_device`.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/99626
Approved by: https://github.com/soulitzer
Description:
- As suggested by Nikita, created `torch.backends.cpu` submodule and exposed `get_cpu_capability`.
- In torchvision Resize method we want to know current cpu capability in order to pick appropriate codepath depending on cpu capablities
Newly coded vectorized resize of uint8 images on AVX2 supported CPUs is now faster than older way (uint8->float->resize->uint8). However, on non-avx hardware (e.g. Mac M1) certain configs are slower using native uint8.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/100164
Approved by: https://github.com/albanD, https://github.com/malfet
Summary
* Introduce `DiagnosticContext` to `torch.onnx.dynamo_export`.
* Remove `DiagnosticEngine` in preparations to update 'diagnostics' in `dynamo_export` to drop dependencies on global diagnostic context. No plans to update `torch.onnx.export` diagnostics.
Next steps
* Separate `torch.onnx.export` diagnostics and `torch.onnx.dynamo_export` diagnostics.
* Drop dependencies on global diagnostic context. https://github.com/pytorch/pytorch/pull/100219
* Replace 'print's with 'logger.log'.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/99668
Approved by: https://github.com/justinchuby, https://github.com/abock
This PR proposes an optimized way to do Exponential Moving Average (EMA), which is faster than the current way using `swa_utils.AveragedModel` described in https://pytorch.org/docs/stable/optim.html#custom-averaging-strategies.
This implementation is asynchronous, and is built as an optimizer wrapper so that the EMA weight update happens without any additional CPU/GPU sync, just after optimizer steps, and with limited code changes.
Example usage:
```
model = Model().to(device)
opt = torch.optim.Adam(model.parameters())
opt = EMAOptimizer(opt, device, 0.9999)
for epoch in range(epochs):
training_loop(model, opt)
regular_eval_accuracy = evaluate(model)
with opt.swap_ema_weights():
ema_eval_accuracy = evaluate(model)
```
Here are some benchmarks (time per iteration) on various torchvision models:
|model|this PR iteration time |swa_utils.AveragedModel iteration time| iteration speedup |
|-----|-----------------------------|-----------------------|---------------------------------------------|
| | | | |
|regnet_x_1_6gf|62.73 |67.998 |1.08 |
|regnet_x_3_2gf|101.75 |109.422 |1.08 |
|regnet_x_400mf|25.13 |32.005 |1.27 |
|regnet_x_800mf|33.01 |37.466 |1.13 |
|regnet_x_8gf|128.13 |134.868 |1.05 |
|regnet_y_16gf|252.91 |261.292 |1.03 |
|regnet_y_1_6gf|72.14 |84.22 |1.17 |
|regnet_y_3_2gf|99.99 |109.296 |1.09 |
|regnet_y_400mf|29.53 |36.506 |1.24 |
|regnet_y_800mf|37.82 |43.634 |1.15 |
|regnet_y_8gf|196.63 |203.317 |1.03 |
|resnet101|128.80 |137.434 |1.07 |
|resnet152|182.85 |196.498 |1.07 |
|resnet18|29.06 |29.975 |1.03 |
|resnet34|50.73 |53.443 |1.05 |
|resnet50|76.88 |80.602 |1.05 |
|resnext101_32x8d|277.29 |280.759 |1.01 |
|resnext101_64x4d|269.56 |281.052 |1.04 |
|resnext50_32x4d|100.73 |101.102 |1.00 |
|shufflenet_v2_x0_5|10.56 |15.419 |1.46 |
|shufflenet_v2_x1_0|13.11 |18.525 |1.41 |
|shufflenet_v2_x1_5|18.05 |23.132 |1.28 |
|shufflenet_v2_x2_0|25.04 |30.008 |1.20 |
|squeezenet1_1|14.26 |14.325 |1.00 |
|swin_b|264.52 |274.613 |1.04 |
|swin_s|180.66 |188.914 |1.05 |
|swin_t|108.62 |112.632 |1.04 |
|swin_v2_s|220.29 |231.153 |1.05 |
|swin_v2_t|127.27 |133.586 |1.05 |
|vgg11|95.52 |103.714 |1.09 |
|vgg11_bn|106.49 |120.711 |1.13 |
|vgg13|132.94 |147.063 |1.11 |
|vgg13_bn|149.73 |165.256 |1.10 |
|vgg16|158.19 |172.865 |1.09 |
|vgg16_bn|177.04 |192.888 |1.09 |
|vgg19|184.76 |194.194 |1.05 |
|vgg19_bn|203.30 |213.334 |1.05 |
|vit_b_16|217.31 |219.748 |1.01 |
|vit_b_32|69.47 |75.692 |1.09 |
|vit_l_32|223.20 |258.487 |1.16 |
|wide_resnet101_2|267.38 |279.836 |1.05 |
|wide_resnet50_2|145.06 |154.918 |1.07 |
You can see that in all cases it is faster than using `AveragedModel`. In fact in many cases, adding EMA does not add any overhead since the computation is hidden behind the usual iteration flow.
This is a similar implementation to the one currently in [NVIDIA NeMo](https://github.com/NVIDIA/NeMo).
If the team is interested in merging this, let me know and I'll add some documentation similar to `swa_utils` and tests.
Credits to @szmigacz for the implementation.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/94820
Approved by: https://github.com/janeyx99
Allowed modules are stuck into dynamo's fx graph as call_module
nodes, without dynamo doing any tracing of the module. This means
during AOT trace time, hooks will fire during tracing when the
call_module is executed, but the hooks themselves will disappear
after that and not be present in the compiled program.
(worse, if they performed any tensor operations, those would get
traced so you could end up with part of the hook's functionality).
To circumvent this, there are two options for 'allowed modules' with hooks.
1) don't treat them as 'allowed' - trace into them
2) graph-break, so the module is no longer part of the dynamo trace at all
(1) will fail for users that opted into allowed modules becuase they know
their module has problems being traced by dynamo.
(2) causes graph breaks on common modules such as nn.Linear, just because they
are marked as 'allowed'.
It would help matters if we could differentiate between types of allowed modules
(A) allowed to avoid overheads - used for common ops like nn.Linear
(B) allowed to avoid dynamo graphbreaks caused by unsupported code
Ideally, we'd use method (1) for group (A) and (2) for (B).
For now, graph-break on all cases of allowed modules.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/97184
Approved by: https://github.com/jansel
Summary
* Introduce input/output adapter. Due to design differences, input/output format
between PyTorch model and exported ONNX model are often not the same. E.g., `None`
inputs are allowed for PyTorch model, but are not supported by ONNX. Nested constructs
of tensors are allowed for PyTorch model, but only flattened tensors are supported by ONNX,
etc. The new input/output adapter is exported with the model. Providing an interface to
automatically convert and validate inputs/outputs format.
* As suggested by #98251,
provide extension for unwrapping user defined python classes for `dynamo.export` based
exporter. Unblock huggingface models.
* Re-wire tests to run through `DynamoExporter` w/ `dynamo_export` api. Kept
`DynamoOptimizeExporter` in the tests for now for coverage of this change.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/98421
Approved by: https://github.com/justinchuby, https://github.com/titaiwangms, https://github.com/thiagocrepaldi
This PR makes basic nnmodule forward hooks work by default, without any overhead. But it leaves silent correctness issues if users modify/remove their hooks later, thus also emits a warning.
- the usual case is to not use hooks, so avoid guard overhead here
- registering any hook before compile will trigger a warning about hook support
- registering a hook later (or removing one) requires user knowledge and opting in,
currently this isn't warnable (but maybe we can observe compiled nnmodules to make it
warnable).
Why skip hook guards by default instead of not tracing __call__/hooks by default?
- avoid having a mode flag that alters dynamo tracing behavior (harder to test both codepaths
in CI with full coverage)
- the most basic hook usecase (registering a hook before compile, and never removing it)
will work by default with this PR, while it would require enablement and incur overhead
in the 'not tracing __call__' proposal.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/98371
Approved by: https://github.com/jansel
This is the first phase of the new ONNX exporter API for exporting from TorchDynamo and FX, and represents the beginning of a new era for exporting ONNX from PyTorch.
The API here is a starting point upon which we will layer more capability and expressiveness in subsequent phases. This first phase introduces the following into `torch.onnx`:
```python
dynamo_export(
model: torch.nn.Module,
/,
*model_args,
export_options: Optional[ExportOptions] = None,
**model_kwargs,
) -> ExportOutput:
...
class ExportOptions:
opset_version: Optional[int] = None
dynamic_shapes: Optional[bool] = None
logger: Optional[logging.Logger] = None
class ExportOutputSerializer(Protocol):
def serialize(
self,
export_output: ExportOutput,
destination: io.BufferedIOBase,
) -> None:
...
class ExportOutput:
model_proto: onnx.ModelProto
def save(
self,
destination: Union[str, io.BufferedIOBase],
*,
serializer: Optional[ExportOutputSerializer] = None,
) -> None:
...
```
In addition to the API in the first commit on this PR, we have a few experiments for exporting Dynamo and FX to ONNX that this PR rationalizes through the new Exporter API and adjusts tests to use the new API.
- A base `FXGraphModuleExporter` exporter from which all derive:
- `DynamoExportExporter`: uses dynamo.export to acquire FX graph
- `DynamoOptimizeExporter`: uses dynamo.optimize to acquire FX graph
- `FXSymbolicTraceExporter`: uses FX symbolic tracing
The `dynamo_export` API currently uses `DynamoOptimizeExporter`.
### Next Steps (subsequent PRs):
* Combine `DynamoExportExporter` and `DynamoOptimizeExporter` into a single `DynamoExporter`.
* Make it easy to test `FXSymbolicTraceExporter` through the same API; eventually `FXSymbolicTraceExporter` goes away entirely when the Dynamo approach works for large models. We want to keep `FXSymbolicTraceExporter` around for now for experimenting and internal use.
* Parameterize (on `ExportOptions`) and consolidate Dynamo exporter tests.
- This PR intentionally leaves the existing tests unchanged as much as possible except for the necessary plumbing.
* Subsequent API phases:
- Diagnostics
- Registry, dispatcher, and Custom Ops
- Passes
- Dynamic shapes
Fixes#94774
Pull Request resolved: https://github.com/pytorch/pytorch/pull/97920
Approved by: https://github.com/justinchuby, https://github.com/titaiwangms, https://github.com/thiagocrepaldi, https://github.com/shubhambhokare1
Fixes https://github.com/pytorch/pytorch/issues/97260
We got some feedback that the page reads like "in order to save an input
for backward, you must return it as an output of the
autograd.Function.forward".
Doing so actually raises an error (on master and as of 2.1), but results
in an ambiguous situation on 2.0.0. To avoid more users running into
this, we clarify the documentation so it doesn't read like the above
and clearly mentions that you can save things from the inputs or
outputs.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/98020
Approved by: https://github.com/soulitzer, https://github.com/kshitij12345
Chatted with @stas00 on slack and here are some great improvements he suggested to the compile docs
- [x] Rename `dynamo` folder to `compile`
- [x] Link `compile` docstring on `torch.html` to main index page for compile
- [x] Create a new index page that describes why people should care
- [x] easy perf, memory reduction, 1 line
- [x] Short benchmark table
- [x] How to guide
- [x] TOC that links to the more technical pages folks have written, make the existing docs we have a Technical overview
- [x] Highlight the new APIs for `torch._inductor.list_options()` and `torch._inductor.list_mode_options()` - clarify these are inductor specific and add more prose around which ones are most interesting
He also highlighted an interesting way to think about who is reading this doc we have
- [x] End users, that just want things to run fast
- [x] Library maintainers wrapping torch.compile which would care for example about understanding when in their code they should compile a model, which backends are supported
- [x] Debuggers who needs are somewhat addressed by the troubleshooting guide and faq but those could be dramatically reworked to say what we expect to break
And in a seperate PR I'll work on the below with @SherlockNoMad
- [ ] Authors of new backends that care about how to plug into dynamo or inductor layer so need to explain some more internals like
- [ ] IR
- [ ] Where to plugin, dynamo? inductor? triton?
Pull Request resolved: https://github.com/pytorch/pytorch/pull/96706
Approved by: https://github.com/svekars
Fixes#95796
### Implementation
Adds python implementation for `nn.ZeroPad1d` and `nn.ZeroPad3d` in `torch/nn/modules/padding.py`.
Adds cpp implementation for `nn::ZeroPad1d` and `nn::ZeroPad3d` in the following 3 files, refactored with templates similarly to `nn::ConstantPad`'s implementation: <br>
- `torch/crsc/api/include/torch/nn/modules/padding.h`
- `torch/csrc/api/include/torch/nn/options/padding.h`
- `torch/csrc/api/src/nn/modules/padding.cpp`
Also added relevant definitions in `torch/nn/modules/__init__.py`.
### Testing
Adds the following tests:
- cpp tests of similar length and structure as `ConstantPad` and the existing `ZeroPad2d` impl in `test/cpp/api/modules.cpp`
- cpp API parity tests in `torch/testing/_internal/common_nn.py`
- module init tests in `test/test_module_init.py`
Also added relevant definitions in `test/cpp_api_parity/parity-tracker.md`
Pull Request resolved: https://github.com/pytorch/pytorch/pull/96295
Approved by: https://github.com/soulitzer
This should be self containable to merge but other stuff that's been bugging me is
* Instructions on debugging IMA issues
* Dynamic shape instructions
* Explaining config options better
Will look at adding a config options doc
Pull Request resolved: https://github.com/pytorch/pytorch/pull/95802
Approved by: https://github.com/svekars
Fixed following errors in contribution guide.
"deep neural networks using a **on** tape-based autograd systems." to "deep neural networks **using a tape-based** autograd systems."
"the best entrance **point** and are great places to start." to "the best entrance **points** and are great places to start."
Pull Request resolved: https://github.com/pytorch/pytorch/pull/95454
Approved by: https://github.com/ezyang
Fixes https://github.com/pytorch/serve/issues/1937
A fairly common query I see folks running while using pytorch is
`nvidia-smi --format=csv,noheader,nounits --query-gpu=utilization.gpu,utilization.memory,memory.total,memory.used,temperature.gpu,power.draw,clocks.current.sm,clocks.current.memory -l 10`
Existing metrics we have
* For kernel utilization`torch.cuda.utilization()`
* For memory utilization we have them under `torch.cuda.memory` the memory allocated with `torch.cuda.memory.memory_allocated()`
* For total available memory we have `torch.cuda.get_device_properties(0).total_memory`
Which means the only metrics we're missing are
* Temperature: now in `torch.cuda.temperature()`
* Power draw: now in `torch.cuda.power()`
* Clock speed: now in `torch.cuda.clock_speed()`
With some important details on each
* Clock speed settings: I picked the SM clock domain which is documented here https://docs.nvidia.com/deploy/nvml-api/group__nvmlDeviceEnumvs.html#group__nvmlDeviceEnumvs_1g805c0647be9996589fc5e3f6ff680c64
* Temperature: I use `pynvml.nvmlDeviceGetTemperature(handle, 0)` where 0 refers to the GPU die temperature
Pull Request resolved: https://github.com/pytorch/pytorch/pull/91717
Approved by: https://github.com/ngimel
Corrected the grammar of a sentence in "Implementing Features or Fixing Bugs" section of the contribution guide.
**Before:**
Issues that are labeled first-new-issue, low, or medium priority provide the best entrance point are great places to start.
**After:**
Issues that are labeled first-new-issue, low, or medium priority provide the best entrance point _and_ are great places to start.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/93014
Approved by: https://github.com/albanD, https://github.com/kit1980
Fixes#91824
This PR add a new dynamo backend registration mechanism through ``entry_points``. The ``entry_points`` of a package is provides a way for the package to reigster a plugin for another one.
The docs of the new mechanism:
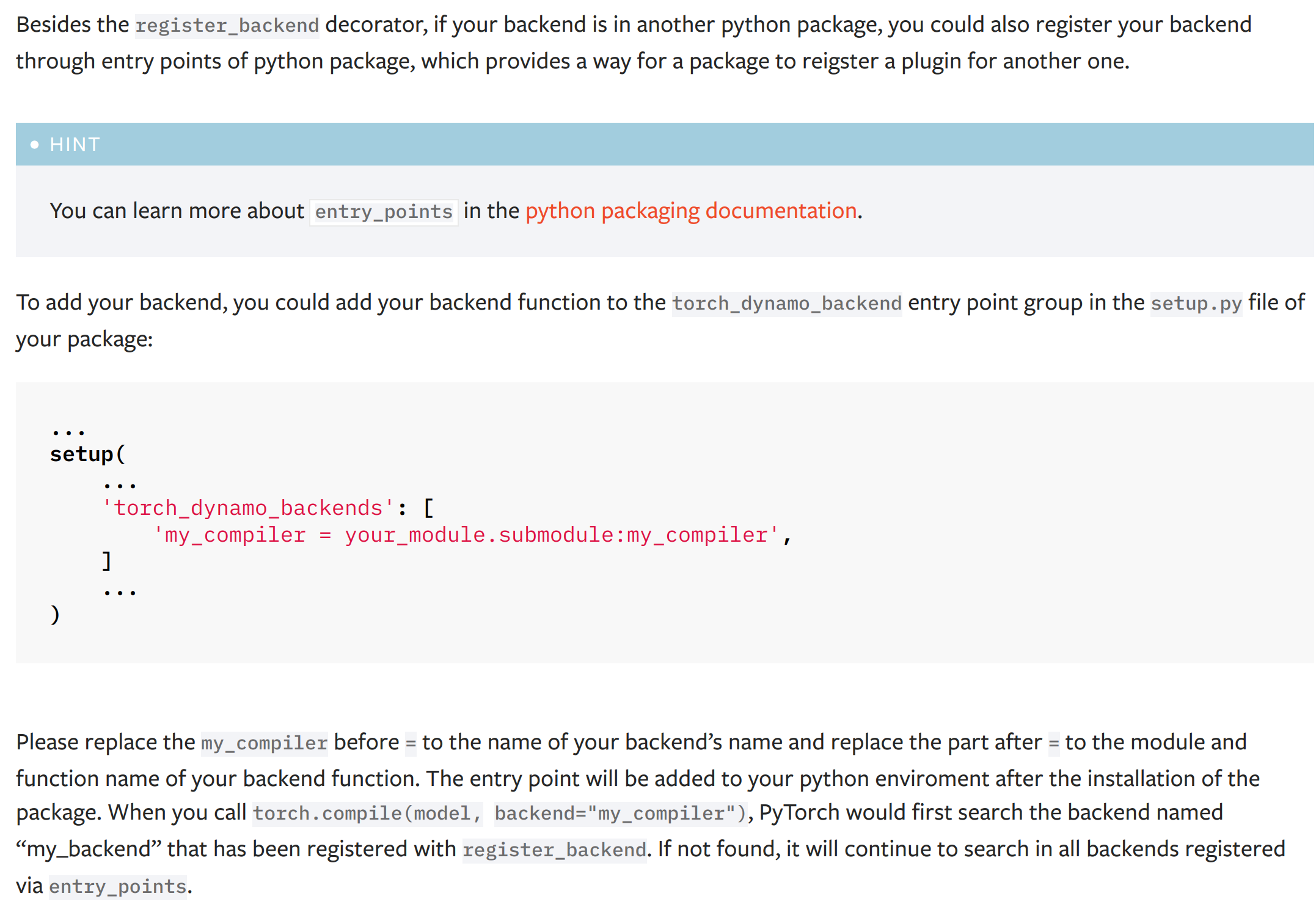
(the typo '...named "my_backend" that has been..." has been fixed to '...named "my_compiler" that has been...')
# Discussion
## About the test
I did not add a test for this PR as it is hard either to install a fack package during a test or manually hack the entry points function by replacing it with a fake one. I have tested this PR offline with the hidet compiler and it works fine. Please let me know if you have any good idea to test this PR.
## About the dependency of ``importlib_metadata``
This PR will add a dependency ``importlib_metadata`` for the python < 3.10 because the modern usage of ``importlib`` gets stable at this python version (see the documentation of the importlib package [here](https://docs.python.org/3/library/importlib.html)). For python < 3.10, the package ``importlib_metadata`` implements the feature of ``importlib``. The current PR will hint the user to install this ``importlib_metata`` if their python version < 3.10.
## About the name and docs
Please let me know how do you think the name ``torch_dynamo_backend`` as the entry point group name and the documentation of this registration mechanism.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/93873
Approved by: https://github.com/malfet, https://github.com/jansel
- To check for Memory Leaks in `test_mps.py`, set the env-variable `PYTORCH_TEST_MPS_MEM_LEAK_CHECK=1` when running test_mps.py (used CUDA code as reference).
- Added support for the following new python interfaces in MPS module:
`torch.mps.[empty_cache(), set_per_process_memory_fraction(), current_allocated_memory(), driver_allocated_memory()]`
- Renamed `_is_mps_on_macos_13_or_newer()` to `_mps_is_on_macos_13_or_newer()`, and `_is_mps_available()` to `_mps_is_available()` to be consistent in naming with prefix `_mps`.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/94646
Approved by: https://github.com/malfet
- This PR is a prerequisite for the upcoming Memory Leak Detection PR.
- Enable global manual seeding via `torch.manual_seed()` + test case
- Add `torch.mps.synchronize()` to wait for MPS stream to finish + test case
- Enable the following python interfaces for MPS:
`torch.mps.[get_rng_state(), set_rng_state(), synchronize(), manual_seed(), seed()]`
- Added some test cases in test_mps.py
- Added `mps.rst` to document the `torch.mps` module.
- Fixed the failure with `test_public_bindings.py`
Description of new files added:
- `torch/csrc/mps/Module.cpp`: implements `torch._C` module functions for `torch.mps` and `torch.backends.mps`.
- `torch/mps/__init__.py`: implements Python bindings for `torch.mps` module.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/94417
Approved by: https://github.com/albanD
- This PR is a prerequisite for the upcoming Memory Leak Detection PR.
- Enable global manual seeding via `torch.manual_seed()` + test case
- Add `torch.mps.synchronize()` to wait for MPS stream to finish + test case
- Enable the following python interfaces for MPS:
`torch.mps.[get_rng_state(), set_rng_state(), synchronize(), manual_seed(), seed()]`
- Added some test cases in test_mps.py
- Added `mps.rst` to document the `torch.mps` module.
- Fixed the failure with `test_public_bindings.py`
Description of new files added:
- `torch/csrc/mps/Module.cpp`: implements `torch._C` module functions for `torch.mps` and `torch.backends.mps`.
- `torch/mps/__init__.py`: implements Python bindings for `torch.mps` module.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/94417
Approved by: https://github.com/albanD
# Summary
- Adds type hinting support for SDPA
- Updates the documentation adding warnings and notes on the context manager
- Adds scaled_dot_product_attention to the non-linear activation function section of nn.functional docs
Pull Request resolved: https://github.com/pytorch/pytorch/pull/94008
Approved by: https://github.com/cpuhrsch
Preferring dash over underscore in command-line options. Add `--command-arg-name` to the argument parser. The old arguments with underscores `--command_arg_name` are kept for backward compatibility.
Both dashes and underscores are used in the PyTorch codebase. Some argument parsers only have dashes or only have underscores in arguments. For example, the `torchrun` utility for distributed training only accepts underscore arguments (e.g., `--master_port`). The dashes are more common in other command-line tools. And it looks to be the default choice in the Python standard library:
`argparse.BooleanOptionalAction`: 4a9dff0e5a/Lib/argparse.py (L893-L895)
```python
class BooleanOptionalAction(Action):
def __init__(...):
if option_string.startswith('--'):
option_string = '--no-' + option_string[2:]
_option_strings.append(option_string)
```
It adds `--no-argname`, not `--no_argname`. Also typing `_` need to press the shift or the caps-lock key than `-`.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/94505
Approved by: https://github.com/ezyang, https://github.com/seemethere
Changes:
1. `typing_extensions -> typing-extentions` in dependency. Use dash rather than underline to fit the [PEP 503: Normalized Names](https://peps.python.org/pep-0503/#normalized-names) convention.
```python
import re
def normalize(name):
return re.sub(r"[-_.]+", "-", name).lower()
```
2. Import `Literal`, `Protocal`, and `Final` from standard library as of Python 3.8+
3. Replace `Union[Literal[XXX], Literal[YYY]]` to `Literal[XXX, YYY]`.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/94490
Approved by: https://github.com/ezyang, https://github.com/albanD
The previous sentence seemed to imply that sparse may not always be helpful, ie, your execution time may increase when using sparse. But the docs mentioned otherwise.
A simple re-ordering of two words in the documentation to better align with the contextual sentiment.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/93258
Approved by: https://github.com/cpuhrsch
We want to make TorchRec sharded models TorchScriptable.
TorchRec sharded models uses generic types Awaitable[W] and LazyAwaitable[W] (https://github.com/pytorch/torchrec/blob/main/torchrec/distributed/types.py#L212).
In sharded model those types are used instead of contained type W, having the initialization function that produces object of type W.
At the moment when the first attribute of W is requested - `LazyAwaitable[W]` will call its initialization function (on the same stack), cache the result inside and work transparently as an object of W. So we can think about it as a delayed object initialization.
To support this behavior in TorchScript - we propose a new type to TorchScript - `Await`.
In eager mode it works the same as `LazyAwaitable[W]` in TorchRec, being dynamically typed - acting as a type `W` while it is `Await[W]`.
Within torchscript it is `Await[W]` and can be only explicitly converted to W, using special function `torch.jit.awaitable_wait(aw)`.
Creation of this `Await[W]` is done via another special function `torch.jit.awaitable(func, *args)`.
The semantic is close to `torch.jit.Future`, fork, wait and uses the same jit mechanics (inline fork Closures) with the difference that it does not start this function in parallel on fork. It only stores as a lambda inside IValue that will be called on the same thread when `torch.jit.awaitable_wait` is called.
For example (more examples in this PR `test/jit/test_await.py`)
```
def delayed(z: Tensor) -> Tensor:
return Tensor * 3
@torch.jit.script
def fn(x: Tensor):
aw: Await[int] = torch.jit._awaitable(delayed, 99)
a = torch.eye(2)
b = torch.jit._awaitable_wait(aw)
return a + b + x
```
Functions semantics:
`_awaitable(func -> Callable[Tuple[...], W], *args, **kwargs) -> Await[W]`
Creates Await object, owns args and kwargs. Once _awaitable_wait calls, executes function func and owns the result of the function. Following _awaitable_wait calls will return this result from the first function call.
`_awaitable_wait(Await[W]) -> W`
Returns either cached result of W if it is not the first _awaitable_wait call to this Await object or calls specified function if the first.
`_awaitable_nowait(W) -> Await[W]`
Creates trivial Await[W] wrapper on specified object To be type complaint for the corner cases.
Differential Revision: [D42502706](https://our.internmc.facebook.com/intern/diff/D42502706)
Pull Request resolved: https://github.com/pytorch/pytorch/pull/90863
Approved by: https://github.com/davidberard98
We have known for a while that we should in principle support SymBool as a separate concept from SymInt and SymFloat ( in particular, every distinct numeric type should get its own API). However, recent work with unbacked SymInts in, e.g., https://github.com/pytorch/pytorch/pull/90985 have made this a priority to implement. The essential problem is that our logic for computing the contiguity of tensors performs branches on the passed in input sizes, and this causes us to require guards when constructing tensors from unbacked SymInts. Morally, this should not be a big deal because, we only really care about the regular (non-channels-last) contiguity of the tensor, which should be guaranteed since most people aren't calling `empty_strided` on the tensor, however, because we store a bool (not a SymBool, prior to this PR it doesn't exist) on TensorImpl, we are forced to *immediately* compute these values, even if the value ends up not being used at all. In particular, even when a user allocates a contiguous tensor, we still must compute channels-last contiguity (as some contiguous tensors are also channels-last contiguous, but others are not.)
This PR implements SymBool, and makes TensorImpl use SymBool to store the contiguity information in ExtraMeta. There are a number of knock on effects, which I now discuss below.
* I introduce a new C++ type SymBool, analogous to SymInt and SymFloat. This type supports logical and, logical or and logical negation. I support the bitwise operations on this class (but not the conventional logic operators) to make it clear that logical operations on SymBool are NOT short-circuiting. I also, for now, do NOT support implicit conversion of SymBool to bool (creating a guard in this case). This does matter too much in practice, as in this PR I did not modify the equality operations (e.g., `==` on SymInt) to return SymBool, so all preexisting implicit guards did not need to be changed. I also introduced symbolic comparison functions `sym_eq`, etc. on SymInt to make it possible to create SymBool. The current implementation of comparison functions makes it unfortunately easy to accidentally introduce guards when you do not mean to (as both `s0 == s1` and `s0.sym_eq(s1)` are valid spellings of equality operation); in the short term, I intend to prevent excess guarding in this situation by unit testing; in the long term making the equality operators return SymBool is probably the correct fix.
* ~~I modify TensorImpl to store SymBool for the `is_contiguous` fields and friends on `ExtraMeta`. In practice, this essentially meant reverting most of the changes from https://github.com/pytorch/pytorch/pull/85936 . In particular, the fields on ExtraMeta are no longer strongly typed; at the time I was particularly concerned about the giant lambda I was using as the setter getting a desynchronized argument order, but now that I have individual setters for each field the only "big list" of boolean arguments is in the constructor of ExtraMeta, which seems like an acceptable risk. The semantics of TensorImpl are now that we guard only when you actually attempt to access the contiguity of the tensor via, e.g., `is_contiguous`. By in large, the contiguity calculation in the implementations now needs to be duplicated (as the boolean version can short circuit, but the SymBool version cannot); you should carefully review the duplicate new implementations. I typically use the `identity` template to disambiguate which version of the function I need, and rely on overloading to allow for implementation sharing. The changes to the `compute_` functions are particularly interesting; for most of the functions, I preserved their original non-symbolic implementation, and then introduce a new symbolic implementation that is branch-less (making use of our new SymBool operations). However, `compute_non_overlapping_and_dense` is special, see next bullet.~~ This appears to cause performance problems, so I am leaving this to an update PR.
* (Update: the Python side pieces for this are still in this PR, but they are not wired up until later PRs.) While the contiguity calculations are relatively easy to write in a branch-free way, `compute_non_overlapping_and_dense` is not: it involves a sort on the strides. While in principle we can still make it go through by using a data oblivious sorting network, this seems like too much complication for a field that is likely never used (because typically, it will be obvious that a tensor is non overlapping and dense, because the tensor is contiguous.) So we take a different approach: instead of trying to trace through the logic computation of non-overlapping and dense, we instead introduce a new opaque operator IsNonOverlappingAndDenseIndicator which represents all of the compute that would have been done here. This function returns an integer 0 if `is_non_overlapping_and_dense` would have returned `False`, and an integer 1 otherwise, for technical reasons (Sympy does not easily allow defining custom functions that return booleans). The function itself only knows how to evaluate itself if all of its arguments are integers; otherwise it is left unevaluated. This means we can always guard on it (as `size_hint` will always be able to evaluate through it), but otherwise its insides are left a black box. We typically do NOT expect this custom function to show up in actual boolean expressions, because we will typically shortcut it due to the tensor being contiguous. It's possible we should apply this treatment to all of the other `compute_` operations, more investigation necessary. As a technical note, because this operator takes a pair of a list of SymInts, we need to support converting `ArrayRef<SymNode>` to Python, and I also unpack the pair of lists into a single list because I don't know if Sympy operations can actually validly take lists of Sympy expressions as inputs. See for example `_make_node_sizes_strides`
* On the Python side, we also introduce a SymBool class, and update SymNode to track bool as a valid pytype. There is some subtlety here: bool is a subclass of int, so one has to be careful about `isinstance` checks (in fact, in most cases I replaced `isinstance(x, int)` with `type(x) is int` for expressly this reason.) Additionally, unlike, C++, I do NOT define bitwise inverse on SymBool, because it does not do the correct thing when run on booleans, e.g., `~True` is `-2`. (For that matter, they don't do the right thing in C++ either, but at least in principle the compiler can warn you about it with `-Wbool-operation`, and so the rule is simple in C++; only use logical operations if the types are statically known to be SymBool). Alas, logical negation is not overrideable, so we have to introduce `sym_not` which must be used in place of `not` whenever a SymBool can turn up. To avoid confusion with `__not__` which may imply that `operators.__not__` might be acceptable to use (it isn't), our magic method is called `__sym_not__`. The other bitwise operators `&` and `|` do the right thing with booleans and are acceptable to use.
* There is some annoyance working with booleans in Sympy. Unlike int and float, booleans live in their own algebra and they support less operations than regular numbers. In particular, `sympy.expand` does not work on them. To get around this, I introduce `safe_expand` which only calls expand on operations which are known to be expandable.
TODO: this PR appears to greatly regress performance of symbolic reasoning. In particular, `python test/functorch/test_aotdispatch.py -k max_pool2d` performs really poorly with these changes. Need to investigate.
Signed-off-by: Edward Z. Yang <ezyang@meta.com>
Pull Request resolved: https://github.com/pytorch/pytorch/pull/92149
Approved by: https://github.com/albanD, https://github.com/Skylion007
It turns out our old max/min implementation didn't do anything, because `__max__` and `__min__` are not actually magic methods in Python. So I give 'em the `sym_` treatment, similar to the other non-overrideable builtins.
NB: I would like to use `sym_max` when computing contiguous strides but this appears to make `python test/functorch/test_aotdispatch.py -v -k test_aot_autograd_symbolic_exhaustive_nn_functional_max_pool2d_cpu_float32` run extremely slowly. Needs investigating.
Signed-off-by: Edward Z. Yang <ezyang@meta.com>
Pull Request resolved: https://github.com/pytorch/pytorch/pull/92107
Approved by: https://github.com/albanD, https://github.com/voznesenskym, https://github.com/Skylion007
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}